
导读: 1、引言 火灾是发生频繁且极具毁灭性的灾害,不仅会造成巨大的财产损失,而且还会危及人们的生命安全,若能在火灾发生初期就进行识别,则可以减少各种损失。火灾在发生过程中,通常伴随着,高温、高热、强光、强辐射等基本特征。目前火灾探测系统都采用传统的感温...
1、引言
火灾是发生频繁且极具毁灭性的灾害,不仅会造成巨大的财产损失,而且还会危及人们的生命安全,若能在火灾发生初期就进行识别,则可以减少各种损失。火灾在发生过程中,通常伴随着,高温、高热、强光、强辐射等基本特征。目前火灾探测系统都采用传统的感温、感烟、光电等传感器,分别基于火灾的温度、产生的烟气、火焰光谱特征来探测火灾,这些探测系统易受到周围环境以及电子噪声的干扰,误报率非常高,而且这种系统不能掌握火灾现场的情况,无法依靠其进行实时调度与处理。通过卫星监测、飞机巡护、雷电监测、瞭望台监测、视频监测和地面巡护等方式监测森林状况,结合代价又太高。
近年来,通过研究火灾深层次的机理,基于图像处理的火灾监控与预警技术成为人们研究的热点。基于系统前端摄像机拍摄的视频图像进行火灾自动探测。火灾的基本特征强辐射、闪烁性、纹理性一般都能反映到摄取的视频图像序列中,利用图像处理知识对视频图像序列进行分析,获得火灾的多重判据 ,可实现火灾的早期探测[1]。图像型火灾探测技术克服了常规探测技术单一判据的缺点,基本可消除复杂、恶劣环境因素的影响,能有效提高火灾探测的可靠性。
但是目前图像型火灾探测系统往往涉及到视频图像的采集、传输、存储、处理问题,由于一般主监控室都远离前端探测系统,视频图像经过压缩、传输到主监控室后,图像质量明显下降,这对后端图像处理带来很高的要求。本文提出基于TI推出的数字多媒体处理器TMS320DM64为核心的前端火灾探测与自动报警系统软、硬件设计与实现[2]。
2、系统方案设计
如图1所示,系统的有三个主要部分组成:前端火灾探测与报警系统、视频图像无线微波传输、主监控室实时森林防火指挥系统。

图1 系统结构图
系统中每个前端智能设备有独立地址编码,并且每个设备的坐标与地理信息系统中的位置一一对应。通过安装设备前端的摄像机巡回监控覆盖区域的林木视频图像,前端智能火灾探测与自动报警系统,自动识别所监视林区,一旦发现火情,系统通过串口,经微波通讯装置将识别结果传输至监控指挥中心计算机。同时启动后台短信发布平台,在第一时间通知防火相关领导和人员。监控指挥中心电脑还可以体统最近扑火路径,以及赶赴现场的时间等重要信息。前端智能火灾探测与自动报警系统为整个系统的核心部分,监控终端安装在监控现场,它按照监控中心主控电脑的控制参数,完成现场图像的采集、实时图像处理与云台控制等,下面重点介绍前端智能火灾探测与自动报警系统的软硬件设计。
3、系统硬件设计
系统硬件结构图,如图2所示。基于DM642视频图像处理体系结构,数字多媒体处理器DM642是TI公司6000系列专业多媒体视频处理器,采用两级缓存结构,64个独立EDMA通道控制器。同时具有丰富的外部接口:a)3个可配置双通道视频端口Video Port,b)64位外部存储器接口等等。
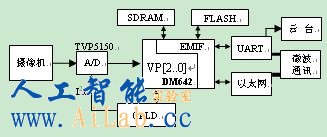
图2 硬件结构图
系统通过CPLD对外设的逻辑进行控制,包括I2C总线、UART以及以太网初始化的配置。通过I2C对A/D[3](TVP5150)初始化后接收CCD传感器模拟数据,量化成数字量后通过VP0-2口,以EDMA方式将特定格式的图像数据搬移到SDRAM或FLASH中以便DSP对数据进行相应的图像处理算法,最后通过UART输出火灾报警与识别信息,通过以太网输出视频图像传回至中控室。
3.1 视频采集电路的设计
视频采集电路采用TI公司的TVP5150作为视频解码芯片。 TVP5150是一款高性能视频解码器,可将NTSC、PAL制式视频信号转换成数字色差信号 (YUV4:2:2),输出格式为ITU-R BT.656,此外,TVP5150还具备了封装小、功耗小的特点。因此,很适合于便携、高质量、高性能的视频处理。DM642上集成了三个 Video Port口,每个视频口被分为上、下两个通道。每个视频口由20位数据线、2个时钟信号、3个控制信号VPxCTL0、VPxCTL1和VPxCTL2组成。系统采用PAL制式的模拟相机将模拟信号送到TVP5150后,按照YCbCr 4:2:2的格式转化成数字信号,时钟信号SCLK与DM642的VP2的VP2CLK0相连;IIC总线的数据线和时钟线为SDA和SCL,分别与DM642的SDA0和SCL0连接。
3.2 通讯接口设计
系统串口采用TL16C752B通用异步收发器UART,其中包含两路相互独立的异步收发器,接收和发送各代64字节FIFO,并各自带有MODEM接口信号,最高传输数率可达1.5Mbps波特率。TL16C752B采用八位异步并行存储器接口,与DM642外部EMIF接口直接相连。TL16C753B每个通道包含18个寄存器,通过地址寄存器A2-A0以及寄存器位对它们进行寻址。TL16C753B还提供两个中断请求信号INTA、INTB分别用与两个UART通道中断申请,系统中INTA与INTB复用连接至DM642中断INT4。系统的两个串口分别用于主机通讯和云台控制。传输协议于数据包格式如下:通讯采用RS-232串行通讯,无校验,8位数据位,1位停止位。命令内容为16进制,波特率9600。DSP控制视频服务器报警的同时对云台进行制动控制,使云台固定于当前状态,以备监控中心观察林区实时图像。DSP根据云台控制协议通过另一路RS232端口回读云台转角数据信息,存储并随预警信号以及其他信息通过第一路RS232一并发送至视频服务器,传回监控中心。
DM642的网络接口由EMAC(Ethernet MAC)与MDIO(Management Data Input/Output)两部分组成,其中EMAC为网络的数据通路,MDIO为EMAC的状态与控制接口。DM642的网络接口主要支持物理层的网络器件(PHY)与DSP之间的接口。系统采用Broadcom公司的BCM5221作为以太网收发器,BCM5221的MII接口与DM642的MII接口相连。以太网原理框图如图3;
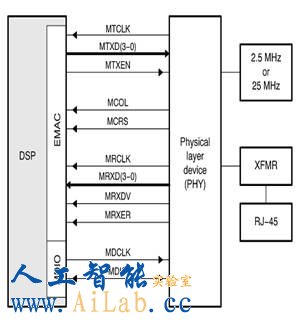
图3 以太网原理框图
视频流经H.264标准压缩后通过以太网接口经微波通讯回传至监控指挥中心计算机,并实时显示。
4、系统软件设计
本设计在软件功能上分为三个独立的子程序:a)监测和判断程序,该程序是软件部分的核心,负责完成对视频传感器的数据进行采集、处理、以及整个系统的监测和火灾的判断。b)数据通信程序:负责在需要时将储存器中的采样数据和火灾判断结果上传给中控室作进一步的分析和判断。c)摄像机云台控制程序。下面主要介绍火灾图像的识别算法。
4.1 火灾图像识别算法
在本系统中,利用火灾图像独有的特征,火灾初期烟云的序列图像具有如下几个特征: 相邻帧图像的边缘不稳定;相邻帧图像具有稳定的相似性;图像的相似度在一定的区间内变化;图像中火灾部位的灰度大于其它部位的灰度。本文基于火灾初期烟云图像序列的特性提出火灾图像识别算法。首先,对视频流连续帧图像做初步检测,通过对图像二值化、膨胀与腐蚀处理提取火灾初期烟云的可疑区域。其次,通过估计连续帧图像,对烟云像数的积累,找到烟云可疑区域在不同帧图像上的区域,并将其作为待匹配区域,同时消除非目标信号干扰。最后,利用相关性分析,确定烟云区域[4]。
首先,在火灾早期烟云的识别中,可以对每帧图像做以下操作:首先寻找本帧图像的上述特征信息。为了获取图像的各种特征信息,要对图像做以下处理:设数字化图像序列为:







其中F(i,j)为二值模板,可以消除图像中噪声点与孤立点。通过以上算法处理,确定可疑区域并将其作为最后的判断和检测依据。如图4,5所示:
其次,当发现可疑区域后,对边缘检测之后的二值图像进行边界跟踪,可容易得到面积变化、形体变化、整体移动等特征信息。通过设定固定时间间隔t,计算每帧二值图像烟云像数个数
最后,当确定待匹配区域后,利用相邻帧变化图像的相关系数公式: (3)
f(n),g(n)为相邻两帧的灰度直方图, 为灰度直方图的均值。
由于图像序列的相似程度远远大于有烟云后的相似程度,因此对待匹配区域与预先保存背景图像相应区域作相关计算,通过设定相应的阈值T,即可提取烟云区域[5]。根据大量试验验证,DSP利用系统背景均值的变化(光线变化)自动更新背景图片以及根据灰度均值设置相应的阈值T。
4.2 识别算法在DSP上的实现
程序设计上需要使用混合语言编程,用C语言设计程序中对运行时间影响不大的模块,而用汇编语言设计严格要求实时性的核心算法。为达到时间与效率最优的结果,在程序的设计中要注意以下几个方面:
1. 在涉及图像处理算法时应尽可能地使用IMGLIB [6]库中的函数,因为这些函数均用汇编语言编写,优化程度很高。另外,在C程序中尽可能地采用内联(inline)函数,以便提高代码的集成度。由于采用混合编程方法,因此在程序设计上要严格遵循函数调用规则和寄存器的使用约定。
2. 识别算法中涉及到了卷积和乘累加操作,这可以通过使用循环寻址功能和乘累加指令来实现。另外,TI DSP提供了可延迟的转移、调用和返回指令。这些指令的执行时间比它们对应的非延迟指令要少2个周期,需要注意的是有时要在延迟指令后插入NOP指令,以保证适当的操作顺序。
5、结论
基于DM642的新型终端火灾识别系统,火灾的识别完全在监控终端进行,实现了监控终端的全数字化,通过智能图像处理与模式识别算法对火灾进行自动识别,具有较高的灵敏度和极低的误报警率。并且此系统还具有成本低、监控范围广、响应时间快、体积小,有很高的应用价值,目前此系统已应用于实际应用。在实际使用中,系统还存在一定误报,通过进一步改善算法或利用多传感器方法 ,有望进一步减少误报率,提高稳定性。








